Micromouse Robotics
I was the software team lead on Case Western's Micromouse robotics team for four years.
Micromouse is a robotics competition where teams compete to create and program a small (mouse-sized) robot to solve a maze. The robot functions completely autonomously (without any remote-control) and has to navigate to the center of the maze with no prior information.
As software lead, I implemented a tweaked version of the A* search algorithm to navigate the maze, and closed loop sensor control in order to avoid crashing into walls.
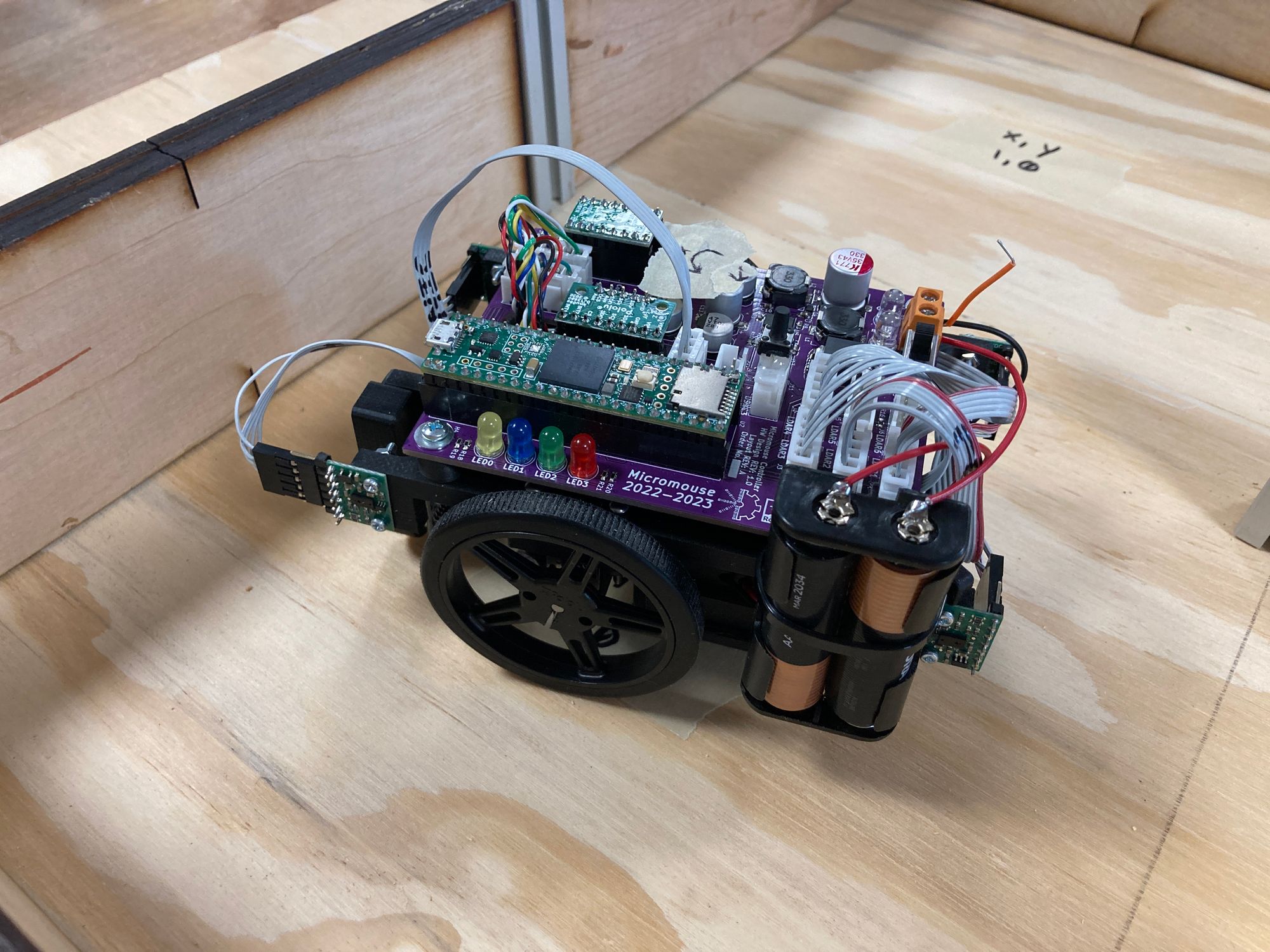
We used the Teensy 3.1 as an embedded microcontroller and the Arduino platform to program the robot.
In 2023, we earned a Silver award at the National Robotics Challenge.
Myself and another former member of that team continued developing small autonomous robots with our entry into the APEC 2025 Micromouse contest.